행렬의 SVD(특이값 분해)는 해당 행렬을 세 개의 행렬로 인수분해한 것입니다. 이는 몇 가지 흥미로운 대수적 특성을 갖고 있으며 선형 변환에 대한 중요한 기하학적, 이론적 통찰력을 전달합니다. 또한 데이터 과학에도 몇 가지 중요한 응용 프로그램이 있습니다. 이 글에서는 SVD의 수학적 직관과 그 기하학적 의미를 설명하려고 합니다.
SVD 뒤에 숨은 수학:
mxn 행렬 A의 SVD는 다음 공식으로 표현됩니다. 
어디:
- 안에: mxm 정규직교 고유벡터의 행렬
 .
. - 안에티: a의 전치 nxn 정규직교 고유벡터를 포함하는 행렬
 .
. -
 : AAᵀ 또는 Aᵀ A의 양의 고유값의 근과 동일한 r 요소를 갖는 대각 행렬(두 행렬 모두 어쨌든 동일한 양의 고유값을 가짐)
: AAᵀ 또는 Aᵀ A의 양의 고유값의 근과 동일한 r 요소를 갖는 대각 행렬(두 행렬 모두 어쨌든 동일한 양의 고유값을 가짐)



예
- 행렬 A =에 대한 SVD를 구합니다.

- SVD를 계산하려면 먼저 AA^{T}의 고유값을 찾아 특이값을 계산해야 합니다.


- 위 행렬의 특성 방정식은 다음과 같습니다.



그래서 우리의 특이값은 다음과 같습니다: 
- 이제 우리는 올바른 특이 벡터, 즉 A의 고유 벡터의 정규 직교 집합을 찾습니다.티A. A의 고유값티A는 25, 9, 0이고 A 이후티A는 대칭입니다. 우리는 고유벡터가 직교할 것이라는 것을 알고 있습니다.
을 위한 
사용자 이름의 예

이는 다음과 같이 행 축소될 수 있습니다.

해당 방향의 단위 벡터는 다음과 같습니다.

마찬가지로 lambda = 9인 경우 고유벡터는 다음과 같습니다.

세 번째 고유벡터의 경우 v1 및 v2에 수직이라는 속성을 사용할 수 있습니다.

위 방정식을 풀어 세 번째 고유벡터를 생성합니다.

이제 u_i = frac{1}{sigma} A v_i 공식을 사용하여 U를 계산하면 U =  . 따라서 최종 SVD 방정식은 다음과 같습니다.
. 따라서 최종 SVD 방정식은 다음과 같습니다.

응용
- 의사 역의 계산: 유사 역행렬 또는 무어-펜로즈 역행렬은 역행렬이 불가능할 수 있는 역행렬(예: 낮은 순위 행렬)을 일반화한 것입니다. 행렬이 가역적이면 역행렬은 유사 역행렬과 동일하지만 역행렬이 아닌 행렬에는 유사 역행렬이 존재합니다. A로 표시됩니다.+.
Suppose, we need to calculate the pseudo-inverse of a matrix M: Then, the SVD of M can be given as: Multiply both sides by M^{-1}.Multiply both side by V:Multiply by W^{-1}Since the W is the singular matrix, the inverse of W is Multiply by>위의 방정식은 유사 역수를 제공합니다.
동차 선형 방정식 세트 풀기(Mx =b): b=0이면 SVD를 계산하고 V의 열을 취합니다.티특이값과 연관됨( 안에 )는 0과 같습니다.
If , Multiply by>
유사 역수로부터 우리는 다음을 압니다. 
따라서,
특수문자 이름

- 순위, 범위 및 Null 공간:
- 행렬 M의 순위는 SVD에서 0이 아닌 특이값의 개수로 계산할 수 있습니다.
- 행렬 M의 범위는 0이 아닌 특이값에 해당하는 U의 왼쪽 특이 벡터입니다.
- 행렬 M의 영공간은 0으로 지정된 특이값에 해당하는 V의 오른쪽 특이 벡터입니다.

- 곡선 피팅 문제: 최소 제곱 오차를 최소화하기 위해 특이값 분해를 사용할 수 있습니다. 이를 근사화하기 위해 유사 역원을 사용합니다.
- 위의 응용 외에도 특이값 분해 및 의사 역수를 디지털 신호 처리 및 이미지 처리에 사용할 수 있습니다.
구현:
이 코드에서는 Numpy와 Scipy를 사용하여 특이값 분해를 계산해 보겠습니다. 우리는 SVD를 계산하고 pseudo-inverse도 수행할 것입니다. 결국 이미지 압축을 위해 SVD를 적용할 수 있습니다.
파이썬3
# Imports> from> skimage.color>import> rgb2gray> from> skimage>import> data> import> matplotlib.pyplot as plt> import> numpy as np> from> scipy.linalg>import> svd> '''> Singular Value Decomposition> '''> # define a matrix> X>=> np.array([[>3>,>3>,>2>], [>2>,>3>,>->2>]])> print>(X)> # perform SVD> U, singular, V_transpose>=> svd(X)> # print different components> print>(>'U: '>, U)> print>(>'Singular array'>, singular)> print>(>'V^{T}'>, V_transpose)> '''> Calculate Pseudo inverse> '''> # inverse of singular matrix is just the reciprocal of each element> singular_inv>=> 1.0> /> singular> # create m x n matrix of zeroes and put singular values in it> s_inv>=> np.zeros(X.shape)> s_inv[>0>][>0>]>=> singular_inv[>0>]> s_inv[>1>][>1>]>=> singular_inv[>1>]> # calculate pseudoinverse> M>=> np.dot(np.dot(V_transpose.T, s_inv.T), U.T)> print>(M)> '''> SVD on image compression> '''> cat>=> data.chelsea()> plt.imshow(cat)> # convert to grayscale> gray_cat>=> rgb2gray(cat)> # calculate the SVD and plot the image> U, S, V_T>=> svd(gray_cat, full_matrices>=>False>)> S>=> np.diag(S)> fig, ax>=> plt.subplots(>5>,>2>, figsize>=>(>8>,>20>))> curr_fig>=> 0> for> r>in> [>5>,>10>,>70>,>100>,>200>]:> >cat_approx>=> U[:, :r] @ S[>0>:r, :r] @ V_T[:r, :]> >ax[curr_fig][>0>].imshow(cat_approx, cmap>=>'gray'>)> >ax[curr_fig][>0>].set_title(>'k = '>+>str>(r))> >ax[curr_fig,>0>].axis(>'off'>)> >ax[curr_fig][>1>].set_title(>'Original Image'>)> >ax[curr_fig][>1>].imshow(gray_cat, cmap>=>'gray'>)> >ax[curr_fig,>1>].axis(>'off'>)> >curr_fig>+>=> 1> plt.show()> |
>
>
산출:
[[ 3 3 2] [ 2 3 -2]] --------------------------- U: [[-0.7815437 -0.6238505] [-0.6238505 0.7815437]] --------------------------- Singular array [5.54801894 2.86696457] --------------------------- V^{T} [[-0.64749817 -0.7599438 -0.05684667] [-0.10759258 0.16501062 -0.9804057 ] [-0.75443354 0.62869461 0.18860838]] -------------------------- # Inverse array([[ 0.11462451, 0.04347826], [ 0.07114625, 0.13043478], [ 0.22134387, -0.26086957]]) ---------------------------> 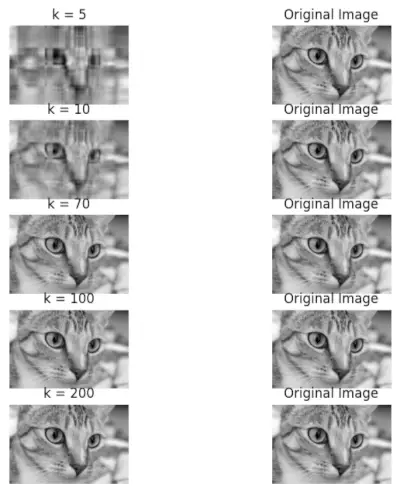
원본 대 SVD k-이미지